Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
Triton-Ai Racquet Ball Launcher Magazine and Control
2024-2025 - Spring
Team: 34


Antibiofouling System for Moored Marine Instruments
2024-2025 - Spring
Team: 23


MRI Stereo
2024-2025 - Spring
Team: 5

Quantum Engineered Nano Device
2024-2025 - Spring
Team: 4
Team Members
Scott Ceklarz
Kalie Garcia
Satchin Narasimhan

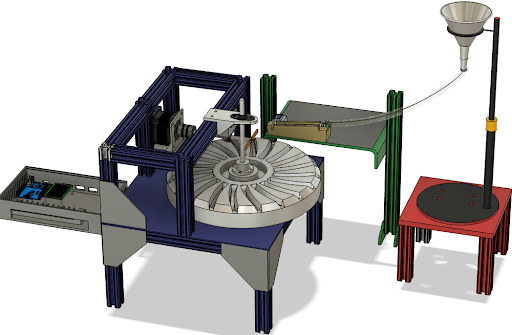
Random Positioning Machine 2.0
2024-2025 - Spring
Team: 31



Jacobs Hall Clock Revival
2024-2025 - Spring
Team: 33
Team Members
Jonathan Dela Cruz
Irving Ding
Fatima Fazli
Fernando Gochicoa
Lacey Potter

Autogyro UAV
2024-2025 - Spring
Team: 22

Bidirectional Guide for Treatment of Peripheral Artery Disease
2024-2025 - Spring
Team: 21

UCSD Med Low Cost Microsurgery Instruments
2024-2025 - Spring
Team: 14

UCSD Med Nerve to Smile
2024-2025 - Spring
Team: 13


UCSD Med Absorbable Springs
2024-2025 - Spring
Team: 12
SE Scribing Solar Panels
2024-2025 - Spring
Team: 11

Hi Tech Honeycomb Automation
2024-2025 - Spring
Team: 10

GA Autoloader Recovery Fusion
2024-2025 - Spring
Team: 9


DM Consulting - Dry Dock Block
2024-2025 - Spring
Team: 8

Automating the Cutting Process Hi-Tech Honeycomb
2024-2025 - Spring
Team: 38
Team Members
Rowan Barg
Micah Borg
Elijah Matthews
Daniel Sun

Cellxercise Machine
2024-2025 - Spring
Team: 2

Design and Analysis of a Mode-Transitioning Robotic Leg and Test Bed for a Hexapod Rescue Robot
2024-2025 - Spring
Team: 37
Team Members
William Harris
Lucas Yager
Giovanni Bernal Ramirez
Hwuiyun Park
Elias Smith

Kinetic Craft Center Sign
2024-2025 - Spring
Team: 6


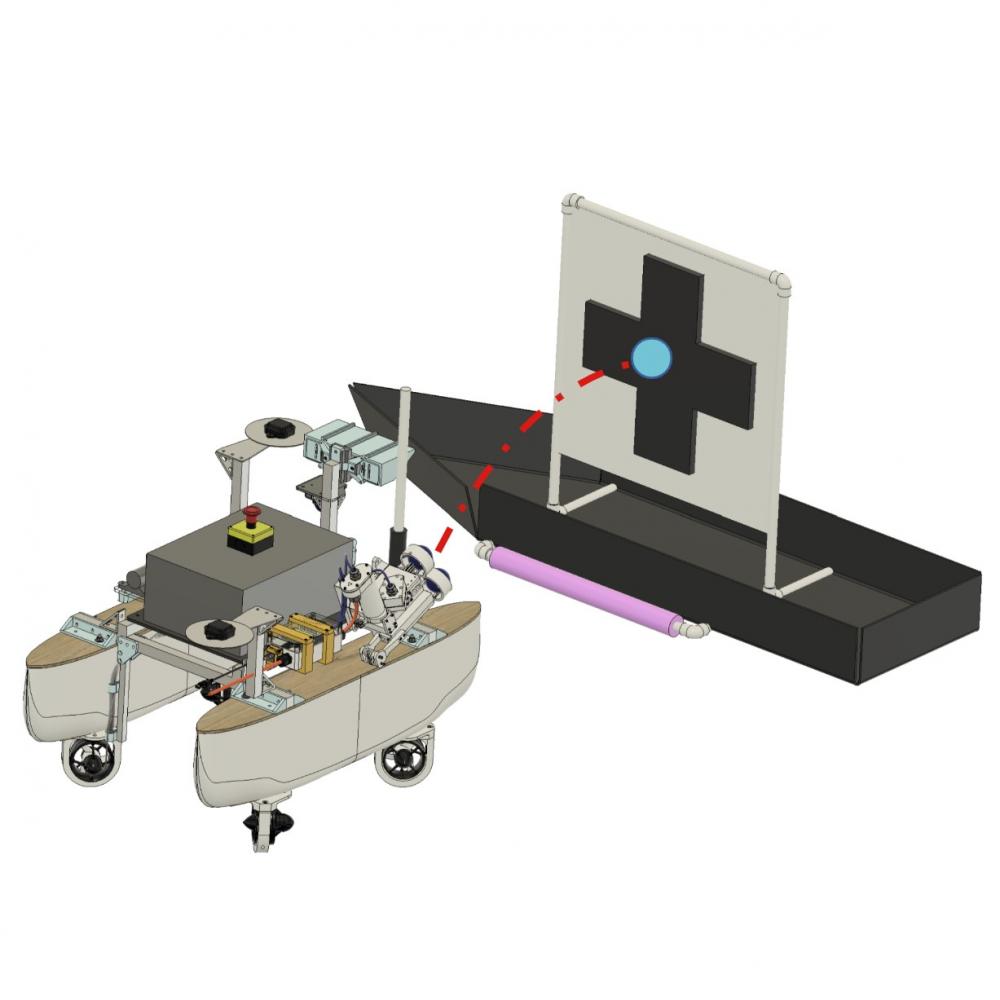
Lifesaver Project Rover Module
2024-2025 - Spring
Team: 39


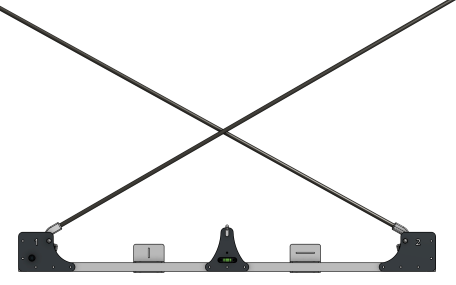
ATA Shock Test Table Firing Mechanism
2024-2025 - Spring
Team: 1
Team Members
Manu Mittal
Nina Abraham
Marco Rincon Villanueva
Anne Marlow
Reggie Estrella

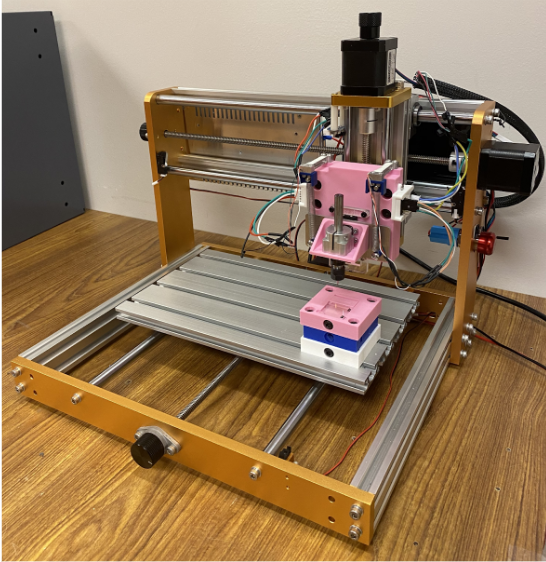
Improved Punch Biopsy Tool
2024-2025 - Spring
Team: 35


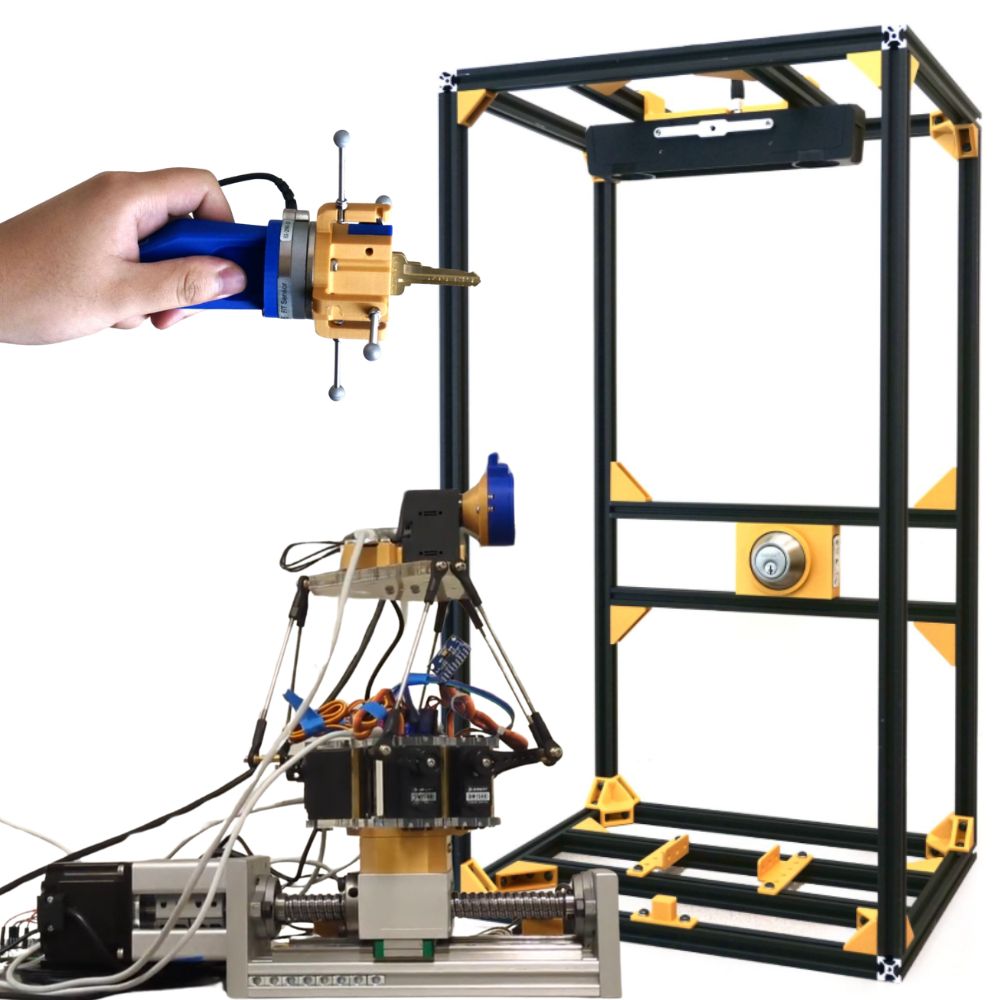
Unlocking the Door with AI
2024-2025 - Spring
Team: 40
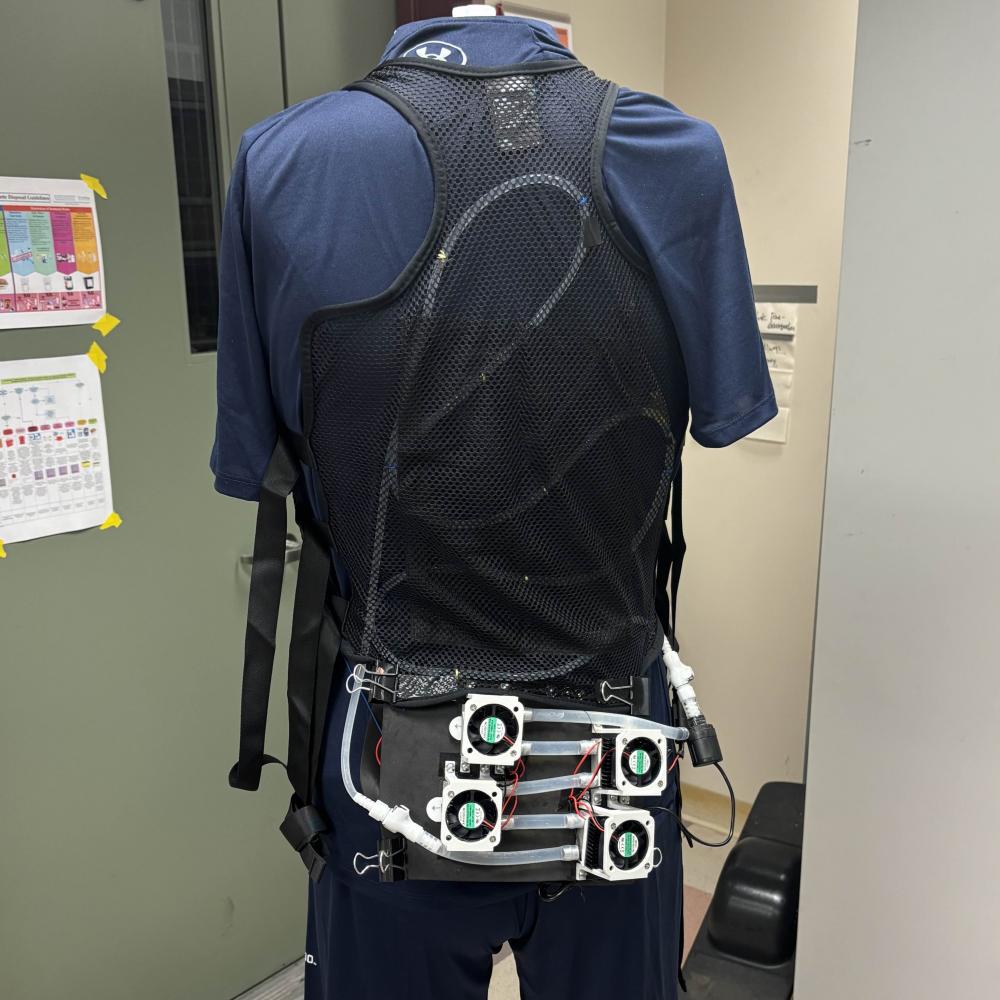
Portable TEC-Based Liquid Cooling Garment
2024-2025 - Spring
Team: 30
Team Members
Aaron Lo
Morgan Laney
Fatima Rivera
Karla Ramirez
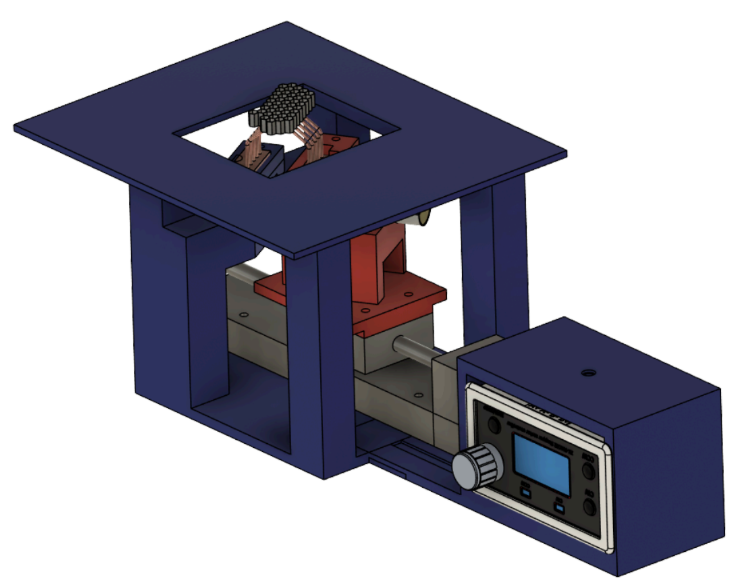
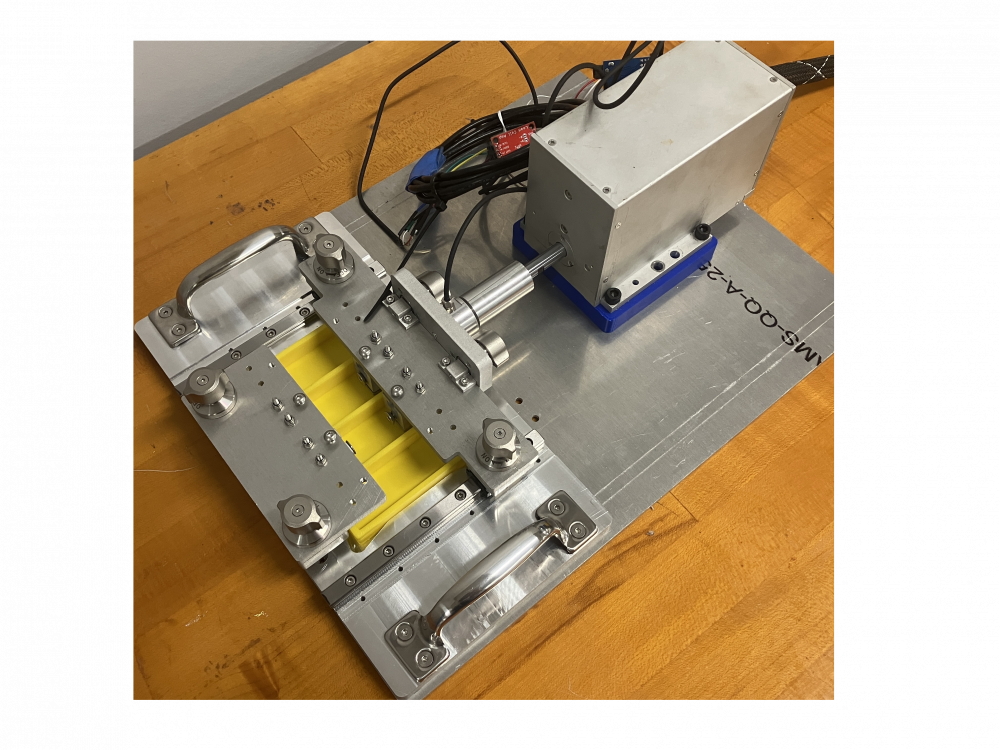
Cell Stretcher 2.0
2024-2025 - Spring
Team: 29
Materials Break Up
2024-2025 - Spring
Team: 16

Resistive Torque Measurement Apparatus
2024-2025 - Spring
Team: 24




NIWC PAC UAS Launch and Recovery
2024-2025 - Spring
Team: 26
Team Members
Parker Amano
Gregory Garner
Gabriel Lepage
Bhodivista Yohn


Wave Energy Converter
2024-2025 - Spring
Team: 25


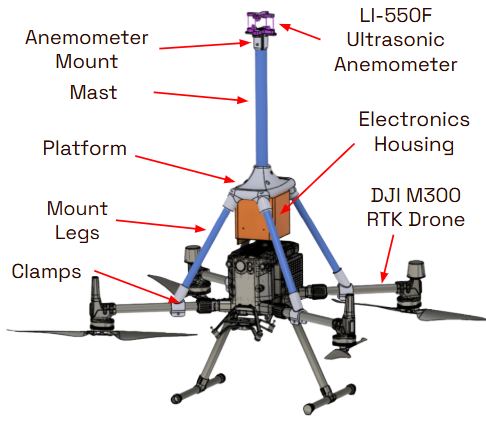
Scripps Anemometer Drone
2024-2025 - Spring
Team: 41