Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
3D Printed Vacuum Assisted Delivery Pump
2025-2026 - Spring
Team: 15


Robotic Petri Dish Gripper
2025-2026 - Spring
Team: 21


Feedback Enabled Thrombectomy Device
2025-2026 - Spring
Team: 6
Team Members
Lucas Kramer
Vikram Tholudur
Hugo De Mendoza
Owen Hanenian

Automated Column Washer
2025-2026 - Spring
Team: 4

RadiCal - Remotely Actuated Radiation Calibration System
2025-2026 - Spring
Team: 16

Point-of-Care Medical Device to Assess Parasympathetic System Function
2025-2026 - Spring
Team: 5


Low-Cost Microsurgical Instruments
2025-2026 - Spring
Team: 18

Robust Hybrid Kapitza's Pendulum
2025-2026 - Spring
Team: 1

GPS Base Station
2025-2026 - Spring
Team: 19
Team Members
Nathaniel Santana
Karla Ballin
Omar Ramadan
Kylie Carmona
Estefany Martinez


Hand for Humanoid Robot
2025-2026 - Spring
Team: 3

Microgravity Drop Tower
2025-2026 - Spring
Team: 23
The Microgravity Drop Tower recreates instantaneous microgravity during free fall, providing a low-cost, on-campus testing site for biological and material samples.



Child Safe Window Guard
2025-2026 - Spring
Team: 17


Medjaw Project
2025-2026 - Spring
Team: 12



Continuous Passive Motion Device for Dynamic Knee Imaging in Small Animal Models
2025-2026 - Spring
Team: 8
Team Members
Najmi Hanis
Aden Wong
Sujaan Mukherjee
Rachel McClow

Thoracic Lavage Adapter
2025-2026 - Spring
Team: 14
Team Members
Michal Machniak
Kim Tran
Daniel Kim
Martin Campos
This project focused on creating an adapter that standardized the connection between IV tubing and chest tubing. The adapter also integrated a 3-way control valve, allowing for the use of a single chest tube during the procedure.

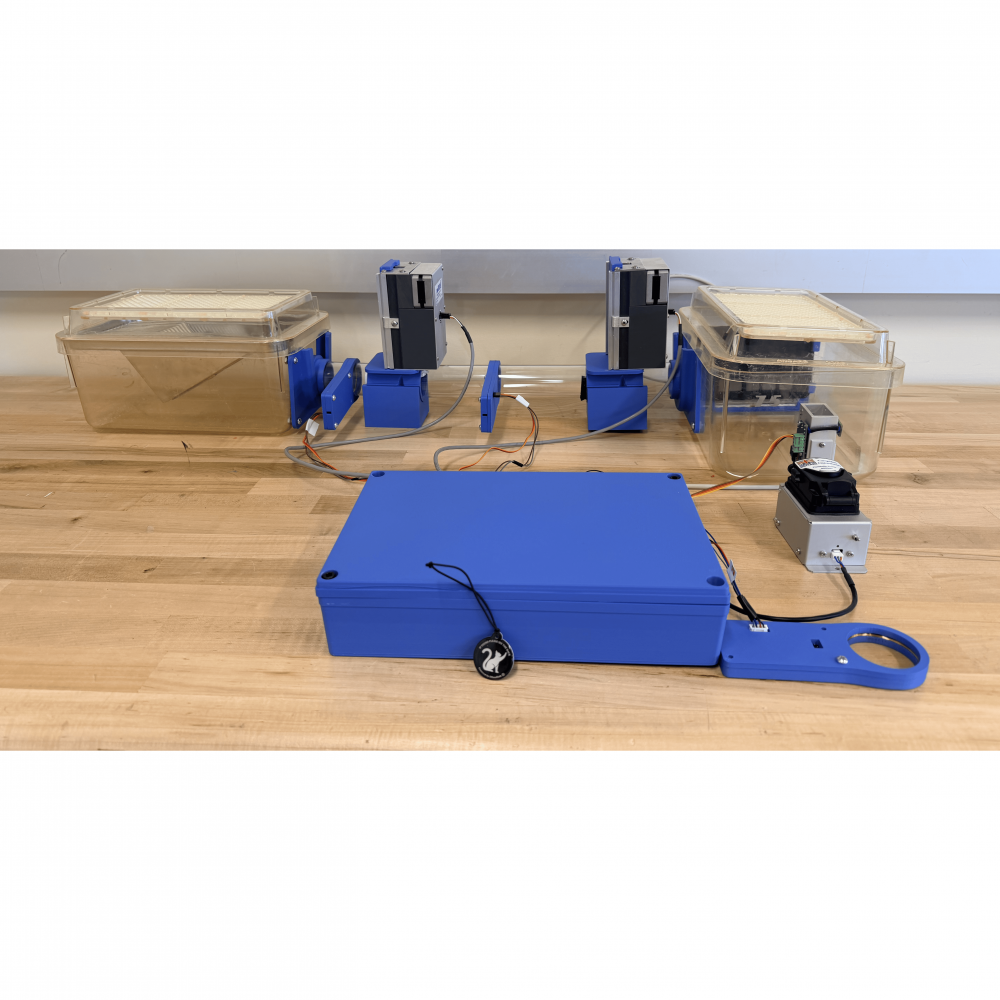
Hot Kidney Summer
2025-2026 - Spring
Team: 9
Team Members
Miguel Chamu-Sosa
Kai Patel
Vince Bantad
Burhanuddin Mamujee
for the preservation and assessment of kidneys prior to transplantation. The new system allows circulation of warm, oxygenated packed red blood cells, allows the user to control perfusion parameters such as flow rate, pressure, and temperature with a centralized system, and reduces the mechanical footprint.

Design, Build, and Test of Mechanical Impulse Pyro Shock (MIPS) Test Table
2025-2026 - Spring
Team: 11


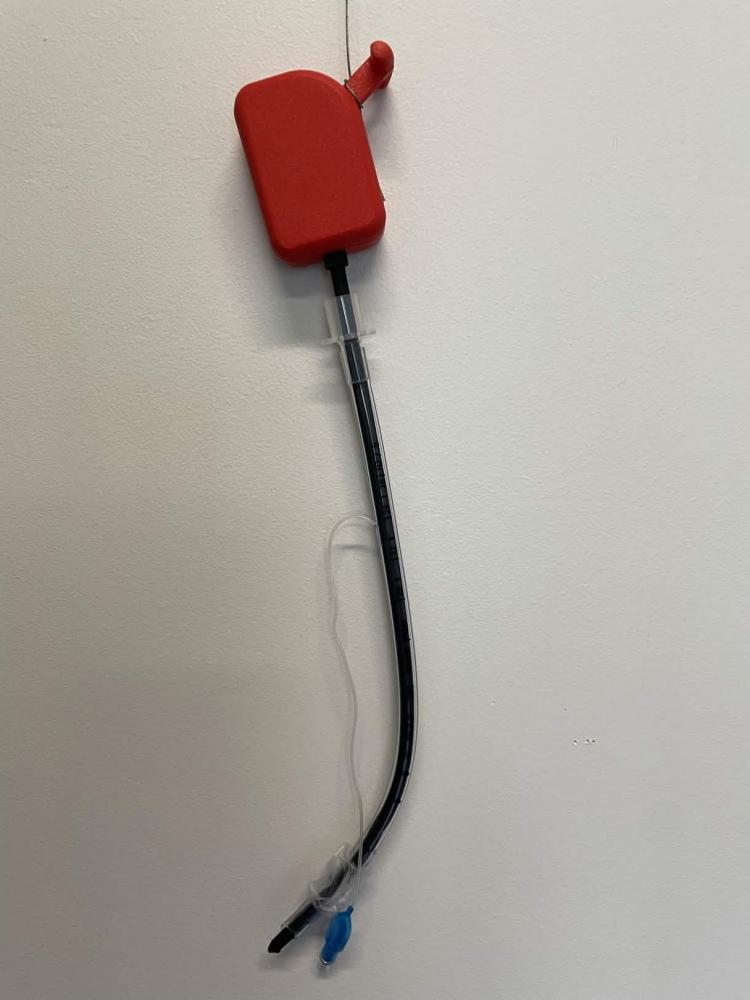
Maneuverable Intubating Stylet
2025-2026 - Winter
Team: 2

RFID-Enabled Cognitive Self-Training System for Mice
2025-2026 - Spring
Team: 13
Team Members
Victor Perez
Hektoras Djabra
Farbod Haeri
Samuel Winters
Portable CO2 Monitor (CO2-Go)
2025-2026 - Spring
Team: 10

Voice Activated Syringe Pump
2025-2026 - Spring
Team: 2

Biodegradable Battery Solution
2025-2026 - Winter
Team: 4


Automated EEG Headset Validation and Characterization Fixture
2025-2026 - Winter
Team: 5

Tecture Creative Art Installation
2025-2026 - Winter
Team: 6
Team Members
Team Member 1: Abdulla Zidan
Team Member 2: Anthony Mark
Team Member 3: Darsh Pawani
Team Member 4: Youngyen Lin


3D Transmission Skull Setup
2025-2026 - Winter
Team: 7

Facilitating Safe Parental Holding of Extremely Preterm Infants in the NICU
2025-2026 - Spring
Team: 20

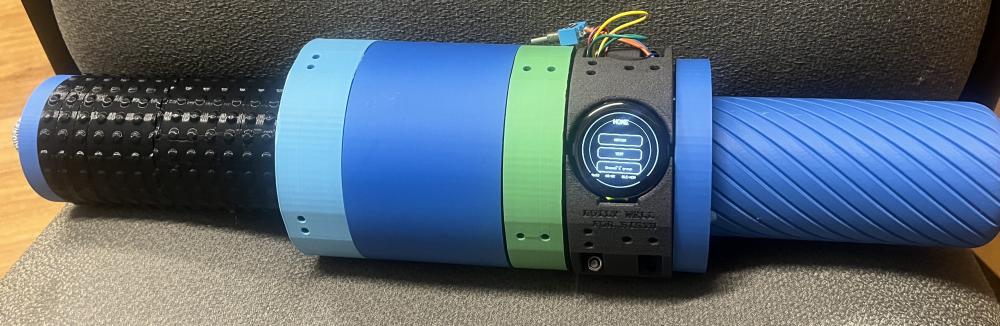
Built Well Torsion Tool
2025-2026 - Winter
Team: 3
Team Members
Britney Rosas
Diego Murray
Michael Santoso
Sofia Vendituoli

Pericardiocentesis Model
2025-2026 - Winter
Team: 1

Multi-Chamber-Camera Bioreactor
2025-2026 - Spring
Team: 22

Animal Care Processing Project (ACCP)
2024-2025 - Spring
Team: 42