
Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
Temperature Control of Rugged 3D Printer
2020-2021 - Spring
Team: 2


Bike Helmet Task Light
2020-2021 - Spring
Team: 15
Automated Solubility Measurement
2020-2021 - Spring
Team: 25
Team Members
Owen Cruise
Yaxin (Cindy) Guan
Kristin Hartsfield
Brandon Lansang
Cade Wohltman
Wearable Lower Body Negative Pressure Pump
2020-2021 - Spring
Team: 23

Brain Organoid Advanced Research Development in Space (BOARDS) Launch Acceleration Simulation Tool
2020-2021 - Spring
Team: 14
Optimization of COVID-19 Testing Workflow
2020-2021 - Spring
Team: 6
ATA Smart Animatronic Figure Breakaway Joint
2020-2021 - Spring
Team: 1
Bicycle Theft Detection
2020-2021 - Spring
Team: 22
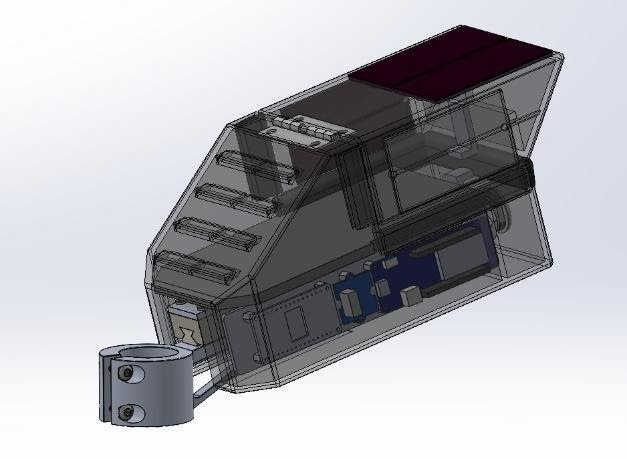
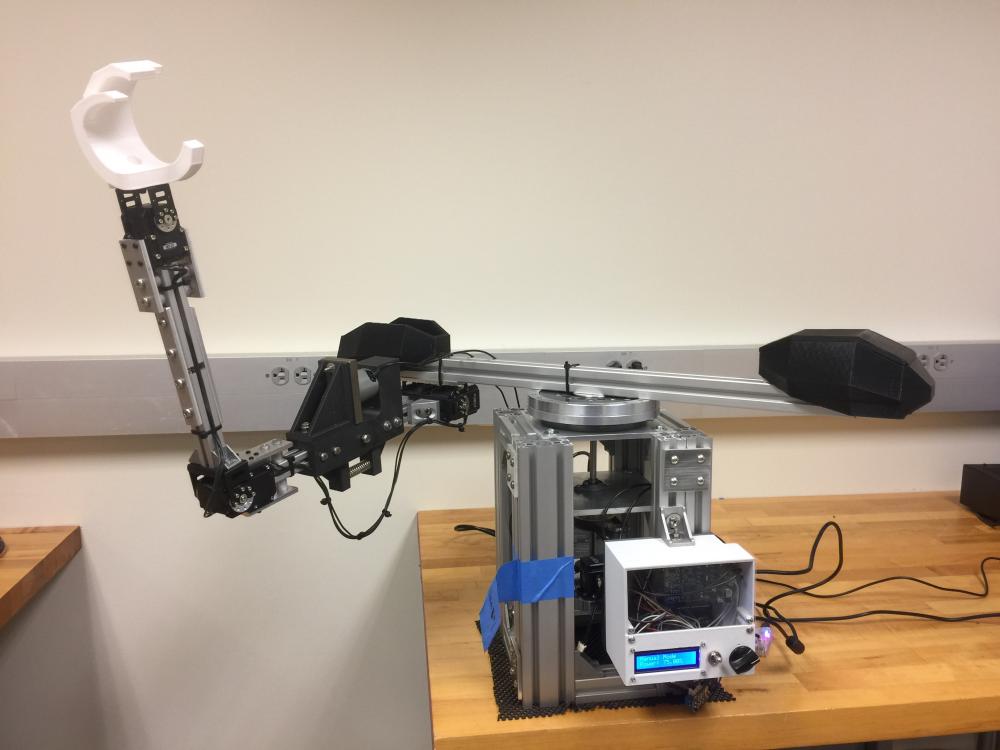
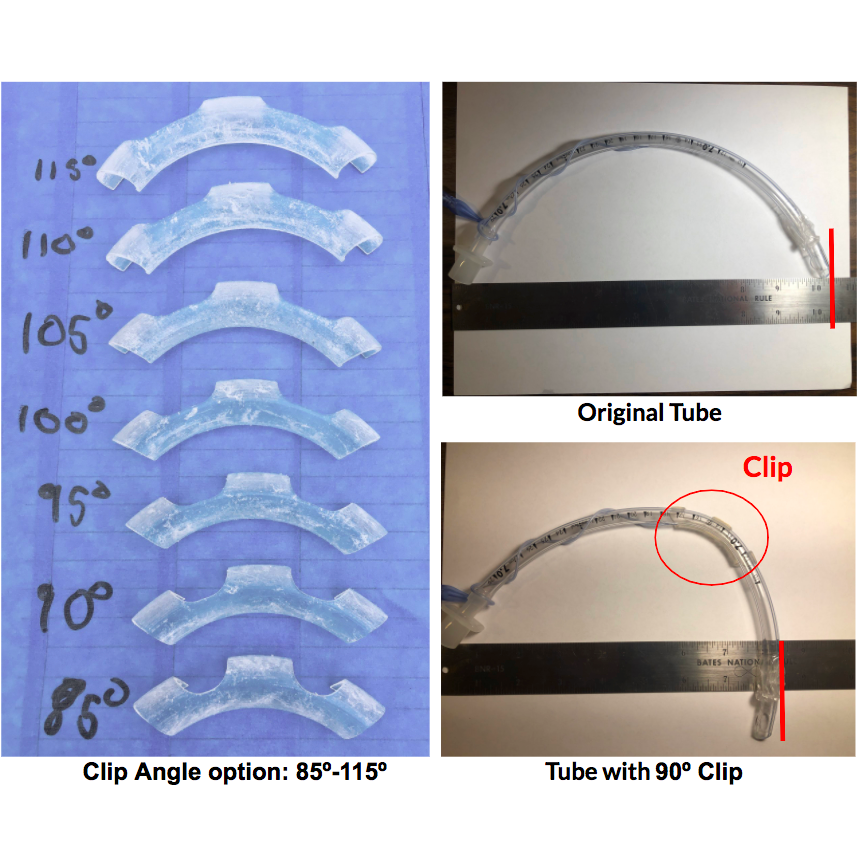
Endotracheal Tube Support System
2020-2021 - Spring
Team: 7
Solar Turbines Alignment Mechanism
2020-2021 - Spring
Team: 5
Team Members
Nigel Coseip
Alberto Guardado
Vicente Lopez-Espinosa
Daniel Lopez Villa
Nicholas Pereyda


General Atomics: Robotic Handling
2020-2021 - Spring
Team: 13

Development of Advanced Hose Clamp
2020-2021 - Spring
Team: 18

Automated Washing System
2004-2005 - Spring
Team: 7
Team Members
Arash Khalifeh
Dan Miller
Darmawan Setiawan
Parminder Ubhi
Ink Cartridge Test-Bed
2004-2005 - Winter
Team: 8
Team Members
Kevin Loewke
John McCague
Linda Hau
Kuroudo Iwanaga

SUV Rack System
2004-2005 - Winter
Team: 7
Team Members
Chad Fondiller
Ukoh Obot
Tyler Mayer
Eric Lin

LADAR Isolation Mount
2004-2005 - Winter
Team: 6
Team Members
Chris Choi
Kyung Park
Steve Geist
Rick Sozzi
Annie Monkowski
RoboPogo the Hopping Robot
2004-2005 - Winter
Team: 5
Team Members
John Bell
Jenny Dyck
Isad Cimanes
Ying Lang Lao
Andrew Marshall
Rotational IR Sensor Array
2004-2005 - Winter
Team: 4
Team Members
Michelle Darley
Sam Hutsell
Ben Penney
Brent Rust
Thomas Sarmiento

Thermoelectric Power Supply
2004-2005 - Winter
Team: 3
Team Members
Jeff Aller
Sarah Au
Katie Bottum
Rick Harrison
Alex Zimmerman
Muscle Fiber Fixture
2004-2005 - Winter
Team: 2
Team Members
Mashia Ghods
Elaine Karaelias
Nelson Bravo
Dustin Wong
Thermal Interface Fixture
2004-2005 - Winter
Team: 1
Team Members
David Allen
Rosalyn Esteves
Lucas Fornace
Jon Hart
Raquel Timmer-Beck
Pheromone Releaser
2004-2005 - Spring
Team: 8
Team Members
Tyler Bettendorf
Ainsley Chiang
Kazu Otani
Lowell Tejada
Harddisk Drop Tester
2004-2005 - Spring
Team: 5
Team Members
Khanh Le
Ken Chen
Oscar Guerrero
Amorsolo Lacanilao
Film Cutting Automation
2004-2005 - Spring
Team: 4
Team Members
Daniel Arnold
Jonathan Costabile
Matthew Oliphant
Brian Uiga
Cultivator Implement
2004-2005 - Spring
Team: 3
Team Members
Anthony Kralj
Zaid Karim
Stephen Perez
Jack Raley
Scanner Analyzer
2004-2005 - Spring
Team: 6
Team Members
Linda Galaviz
Ka Lok Lui
Ronald Roath
Nicholas Tawa
Surface Force Macroscope
2004-2005 - Spring
Team: 2
Team Members
Jeremy Sorensen
Adam Rusch
Raymond Hsu