
Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
Flight Testing Fixture
2002-2003 - Winter
Team: 7
Team Members
Heman Au
Annette Castillo
Brian Cioffi
Quan Dong
Cell Phone Shock Tester
2002-2003 - Winter
Team: 8
Team Members
Brandon Fennema
Chris Fidler
Jason Hamada
Simon Hui
Torque Transducer Calibrator
2002-2003 - Winter
Team: 9
Team Members
Chris Cook
John Donnelly
Michael Mauldin
Kevin McCoy
Raina Taitano
Acoustic Measurement Device, sponsor Navy Marine Mammal Program
2003-2004 - Spring
Team: 1
Team Members
Brandon Braga
Robert Hughes
Jeff Smith
Doug Spence

Skateboard Router
2003-2004 - Spring
Team: 3
Team Members
Elia Fehme
Dan Smith
Kyle Kleinschmidt
Dave Wiens
Liquid Silica Dispenser
2003-2004 - Spring
Team: 4
Team Members
Aaron Davis
Chris Cobb
Justin Searcy
Lane Carlson
Bicycle Rolling Resistance
2003-2004 - Winter
Team: 8
Team Members
Tim Johnson
Tim Lindfelt
Jeffrey Lyo
Eric Price
Ross Stensrud
Convection Loop for Chaotic Flow
2003-2004 - Winter
Team: 7
Team Members
Donna Choi
Daniel Guzman
Erik Danielson
Jing Hu
Danny Lok
Controlled Free Weight System
2003-2004 - Winter
Team: 6
Team Members
Chris Kwanzen Hu
Scott Vernon Wong
Eiki Wai-Chi Or
Jason Robert Korniski
Harry Rafy Arsene
Transmission for Unmanned Ground Vehicle
2003-2004 - Winter
Team: 5
Team Members
William Hui
Fernando Martinez
Brian Parisi
Rosa Sandoval
Byron Tierney
Rollercoaster Track Testing Robot
2003-2004 - Winter
Team: 4
Team Members
Aaron Bell
Ian Cadieux
Ben Graham
Ken Wu

Nanospray Ionization
2003-2004 - Winter
Team: 3
Team Members
Sherry Chaumpluke
Debby Grunewald
Soren Harrison
Phuong Tran
Flying Reagent Dispenser
2003-2004 - Winter
Team: 2
Team Members
J. Armando Chavez
Won Tae Joe
James Chung
Chris Schmidt
Satoshi Kuwahara
Bead Bonding
2003-2004 - Winter
Team: 1
Team Members
Matt Mycroft
Stephanie Hoffman
Joann Luu
Adam Kimmerly
Classroom Table Extension
2003-2004 - Spring
Team: 9
Team Members
Joey Ho
Mary Le
Michael Yang
Sundana Chung
Tactile Navigation Interface
2003-2004 - Spring
Team: 8
Team Members
Laura Chao
Alice Duong
Gustavo Garcia
Yachtbot
2003-2004 - Spring
Team: 7
Team Members
Wayne Husband
Nicolas Padagas
Eric Mellers
Rebecca Denson
Joe Kilcoyne
Microscope Positioner
2003-2004 - Spring
Team: 6
Team Members
Thomas Scholl
Jeffrey Heil
David Hauser
Mike Di Lauro
Gas Turbine Fuel Mixer
2003-2004 - Spring
Team: 5
Team Members
Luca Brammer
James Gregg
Tuan Ong
Danielle Robles

Baseball Fielding Machine
2020-2021 - Winter
Team: 1
Team Members
Tyler Collins
Nicolas Compton
Dain Lee
Don Lee

Wheelchair Accessible Tesla Project
2020-2021 - Spring
Team: 3

Spar Mooring for Ocean Turbulence Measurements
2020-2021 - Winter
Team: 10
Team Members
Eliran Q. Lenard
Ayesha Riaz
Horim Yu
Erik Zamarripa


Intraoperative Tissue Biomechanics Sensor
2020-2021 - Winter
Team: 14

Dermal Cooling Vest
2020-2021 - Winter
Team: 13
Team Members
Joshua Choi
Tyler Compo
Edgar Favila
Vladimir Melnik
Jocelyne A. Perdomo Kú


Cohu Peripheral Pickup
2020-2021 - Winter
Team: 8

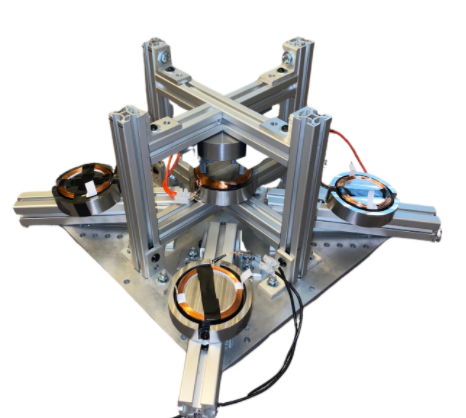
Reconfigurable 3D Magnetic Control System
2020-2021 - Winter
Team: 5

Ultrasound Transducer Guide for Dental Imaging
2020-2021 - Winter
Team: 16


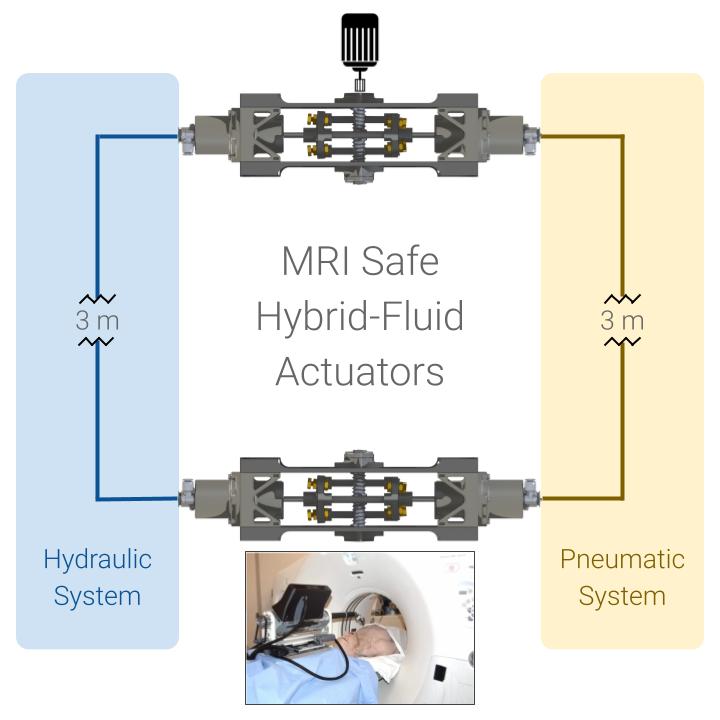
MRI Safe Hybrid-Fluid Actuator
2020-2021 - Winter
Team: 9

Mice Vapor Control
2020-2021 - Winter
Team: 21

